在线客服访客点击留言 |
||||







- 1
- 2
- 3
- 4
- 5
- 6
- 7
DJI大疆无人机
HOME > PRODUCTS > DJI大疆无人机
- 产品名称: 大疆精灵 PHANTOM 4 RTK
- 产品型号: 精灵 PHANTOM 4 RTK
- 产品规格: 厘米级定位系统
- 产品备注:
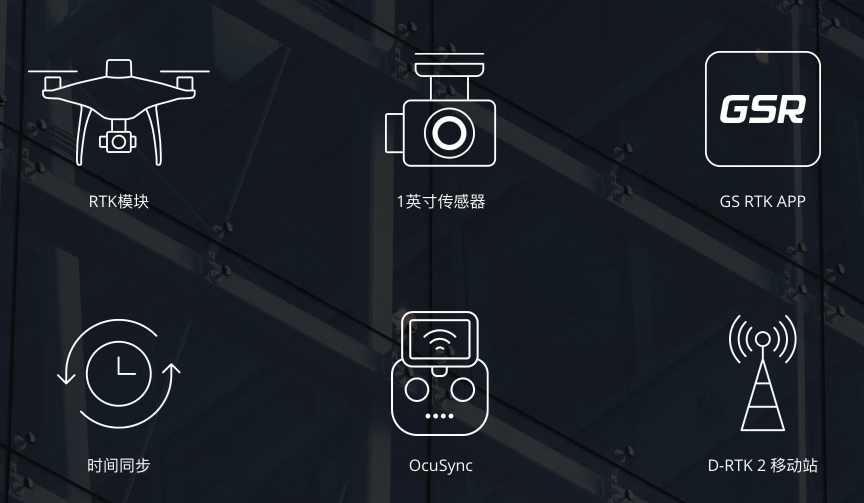
精灵 Phantom 4 RTK是一款小型多旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级导航定位系统和高性能成像系统,便携易用,全面提升航测效率。
一览无余 不差毫厘 精灵 Phantom 4 RTK是一款小型多旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级导航定位系统和高性能成像系统,便携易用,全面提升航测效率。 产品特点
航测新纪元系统全面升级,将航测精度提升至全新标准,为用户带来厘米级精确数据。同时大幅减少传统航测中所需的地面控制点,简化作业流程,降低时间成本。
|



| 重量(含桨和电池) | 1391 g |
|---|---|
| 轴距 | 350 mm |
| 最大起飞海拔高度 | 6000 m |
| 最大上升速度 |
6 m/s(自动飞行) 5 m/s(手动操控) |
| 最大下降速度 | 3 m/s |
| 最大水平飞行速度 |
50 km/h(定位模式) 58 km/h(姿态模式) |
| 最大可倾斜角度 |
25°(定位模式) 35°(姿态模式) |
| 最大旋转角速度 | 150°/s(姿态模式) |
| 飞行时间 | 约 30 分钟 |
| 工作环境温度 | 0℃至 40℃ |
| 工作频率 |
2.400 GHz 至 2.483 GHz(欧洲,日本,韩国) 5.725 GHz 至 5.850 GHz(中国,美国) |
| 等效全向辐射功率(EIRP) |
2.4 GHz CE(欧洲) / MIC(日本) / KCC(韩国):< 20 dBm 5.8 GHz SRRC(中国) / NCC(中国台湾) / FCC(美国):< 26 dBm |
| 悬停精度 |
启用 RTK 且 RTK 正常工作时: 垂直:±0.1 m;水平:±0.1 m 未启用 RTK: 垂直:±0.1 m(视觉定位正常工作时); ±0.5 m(GNSS 定位正常工作时) 水平:±0.3 m(视觉定位正常工作时); ±1.5 m(GNSS 定位正常工作时) |
| 图像位置补偿 | 相机中心相对于机载D-RTK天线相位中心的位置,体轴系下:(36, 0, 192)mm,照片EXIF坐标已补偿。体轴系的XYZ轴正向分别指向飞行器前、右、下方 |
建图功能
| 建图精度 |
满足 GB/T 7930-2008 1:500 地形图航空摄影测量内业规范(简称“1:500 规范”)的精度要求 实际精度与影像采集的环境光照、场景纹理、飞行高度及使用的建图软件等多方面因素有关。 |
|---|---|
| 地面采样距离(GSD) |
(H/36.5) cm/pixel, H 为飞行器相对于拍摄场景的飞行高度(单位:米) |
| 采集效率 | 单次飞行最大作业面积约 1 km2(飞行高度 182 m,即 GSD 约 5 cm/pixel,满足 1:500 规范要求) |
| 可控转动范围 | 俯仰:-90°至 +30° |
| 速度测量范围 | 飞行速度 ≤ 14 m/s(高度 2 米,光照充足) |
| 高度测量范围 | 0 - 10 m |
| 精确悬停范围 | 0 - 10 m |
| 障碍物感知范围 | 0.7 - 30 m |
| 使用环境 |
表面有丰富纹理,光照条件充足 (>15 lux,室内日光灯正常照射环境) |
视觉系统
| 速度测量范围 | 飞行速度 ≤ 50 km/h(高度 2 米,光照充足) |
|---|---|
| 高度测量范围 | 0 - 10 m |
| 精确悬停范围 | 0 - 10 m |
| 障碍物感知范围 | 0.7 - 30 m |
| FOV |
前/后:水平60° , 垂直±27° 下视: 前后70° ,左右50° |
| 测量频率 |
前/后:10 Hz; 下视: 20 Hz |
| 使用环境 | 表面有丰富纹理,光照条件充足(>15 lux,室内日光灯正常照射环境) |
相机
| 影像传感器 | 1 英寸 CMOS;有效像素 2000 万(总像素 2048 万) |
|---|---|
| 镜头 |
FOV 84°;8.8 mm / 24 mm(35 mm 格式等效); 光圈 f/2.8 - f/11;带自动对焦(对焦距离 1 m - ∞) |
| ISO 范围 |
视频:100 - 3200(自动) 100 - 6400(手动); 照片:100 - 3200(自动), 100 - 12800(手动) |
| 机械快门 | 8 - 1/2000 s |
| 电子快门 | 8 - 1/8000 s |
| 照片最大分辨率 |
4864×3648(4:3); 5472×3648(3:2) |
| 录像分辨率 | H.264,4K:3840×2160 30p |
| 设计总画幅 | 5640×3710 |
| 有效画幅 | 5472×3648 |
| 视频最大码流 | 100 Mbps |
| 照片格式 | JPEG |
| 视频格式 | MOV |
| 支持文件系统 |
FAT32(≤ 32 GB); exFAT(> 32 GB) |
| 支持存储卡类型 | 写入速度≥15 MB/s,传输速度为 Class 10 及以上或达到 UHS-1 评级的 microSD 卡,最大支持 128 GB 容量 |
| 工作环境温度 | 0℃至 40℃ |
智能飞行电池(PH4-5870MAH-15.2V)
| 容量 | 5870 mAh |
|---|---|
| 电压 | 15.2 V |
| 电池类型 | LiPo 4S |
| 能量 | 89.2 Wh |
| 电池整体重量 | 468 g |
| 工作环境温度 | -10℃至 40℃ |
| 最大充电功率 | 160 W |
遥控器智能电池(WB37-4920MAH-7.6V)
| 容量 | 4920 mAh |
|---|---|
| 电压 | 7.6 V |
| 电池类型 | LiPo 2S |
| 能量 | 37.39 Wh |
| 工作环境温度 | -20℃至 40℃ |
电源适配器(PH4C160)
| 电压 | 17.4 V |
|---|---|
| 额定功率 | 160 W |
GNSS
| 单频高灵敏度 GNSS |
GPS+BeiDou+Galileo(亚洲地区); GPS+GLONASS+Galileo(其他地区) |
|---|---|
| 多频多系统高精度 RTK GNSS |
使用频点: GPS:L1/L2; GLONASS:L1/L2; BeiDou:B1/B2; Galileo:E1/E5 首次定位时间:< 50 s 定位精度:垂直 1.5 cm + 1 ppm(RMS); 水平 1 cm + 1 ppm(RMS) 1 ppm 是指飞行器每移动 1 km 误差增加 1 mm |
云台
| 稳定系统 | 3-轴(俯仰、横滚、偏航) |
|---|---|
| 可控转动范围 | 俯仰:-90°至 +30° |
| 最大控制转速 | 俯仰:90°/s |
| 角度抖动量 | ±0.02° |
红外感知系统
| 障碍物感知范围 | 0.2 - 7 m |
|---|---|
| FOV |
水平70° 垂直±10° |
| 测量频率 | 10 Hz |
| 使用环境 | 表面为漫反射材质,且反射率 > 8%(如墙面,树木,人等) |
遥控器
| 工作频率 |
2.400 GHz 至 2.483 GHz(欧洲,日本,韩国) 5.725 GHz 至 5.850 GHz(中国,美国) |
|---|---|
| 等效全向辐射功率(EIRP) |
2.4 GHz CE / MIC / KCC:< 20 dBm 5.8 GHz SRRC / FCC:< 26 dBm |
| 信号最大有效距离 |
FCC:7 km; SRRC / CE / MIC / KCC:5 km(无干扰、无遮挡) |
| 功率 | 16 W(典型值) |
| 显示设备 |
5.5 英寸屏幕,分辨率 1920×1080,亮度 1000 cd/m2,Android系统 内存 4G RAM+16G ROM |
| 工作环境温度 | 0℃至 40℃ |
智能飞行电池管家(PHANTOM 4 CHARING HUB)
| 电压 | 17.5 V |
|---|---|
| 工作环境温度 | 5℃至 40℃ |
智能电池充电管家(WCH2)
| 输入电压 | 17.3 - 26.2 V |
|---|---|
| 输出电压电流 |
8.7 V,6 A; 5 V,2 A |
| 工作环境温度 | 5℃至 40℃ |