在线客服访客点击留言 |
||||
在线客服访客点击留言 |
||||




| 基于全景移动测量系统城市专题数据提取研究 | ||
| 来源:中海达官网 | 发布日期:2018-4-25 | 点击率:2758 |
|
Research on Urban Thematic Data Extraction Based on 摘要:通过全景移动测量系统采集的高精度高密度三维激光点云和高分辨率的全景影像,研究自动化和半自动化提取城市专题数据,包括公路交通、城市园林、市政设施和广告牌等专题数据,具体包括道路边线、行道树、路灯、垃圾箱、车道标线和广告牌等。本文提出解决海量点云和全景影像的存储和高效访问问题,通过各类专题数据的空间形态分布特征和激光反射强度属性,研究对应的算法进行自动化和半自动化提取。 关键字:移动测量;三维激光点云;全景影像;海量点云; 1 引言 城市专题地图是社会各界了解城市、管理城市和进行城市信息传输的实用工具,是城市信息的载体和城市研究的可靠手段。测绘新技术的快速发展,带来了更多的地图信息采集获取方式,地图的表现内容更加丰富,在城市地图设计中增加了更多创新形式。为了更高效地获取基础数据信息及降低传统作业成本,昆明市测绘研究院引进全景移动测量系统进行智慧城市基础地理信息数据采集和城市专题数据提取研究。 政府及事业单位部门如交通管理局、园林局、市政局、广告管理处等单位,急需城市最新专题数据,进行城市部件设施更新维护和辅助管理决策,现阶段大部分都通过全站仪、RTK方式进行测量采集,再结合人工调查方式进行遗漏检查和属性调绘。该种方式外业作业劳动强度大,效率低,不能实现城市专题数据的快速提取、更新。 本文通过全景移动测量系统采集的高精度高密度三维激光点云和高分辨率的全景影像,研究自动化和半自动化提取城市专题数据,包括公路交通、城市园林、市政设施和广告牌等专题数据,具体包括道路边线、行道树、路灯、垃圾箱、道路标志线和广告牌等。提出解决海量点云和全景影像的存储和高效访问问题,通过各类专题数据的空间形态分布特征和激光反射强度属性,研究对应的算法进行自动化和半自动化提取。 2 作业工艺流程 使用全景移动测量系统进行城市专题数据采集提取,区别于传统RTK或全站仪作业方式,有其自身最优的作业方式步骤,需要根据不同类型专题图数据标准要求,探索总结作业工艺流程。本研究通过多个试验区项目采集作业,获取软件功能需求,开发专题数据自动化和半自动化提取插件,开发数据处理检查工具,在作业过程中改进软件功能,总结编写城市专题数据采集规程。
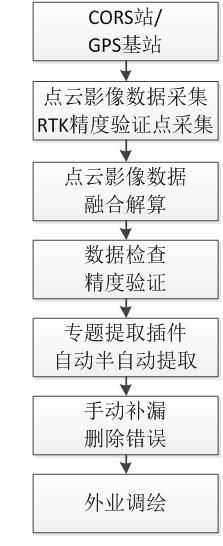
图1 作业工艺流程图
为保证本项目数据采集的精度可靠性,以及后续对精度验证比对的方便性,GPS基站静态数据采用昆明市CORS站点,选取离测区最近的CORS站。 CORS详细要求:
①获取CORS基站全天静态数据; 2.2 全景移动测量系统数据采集 根据交通状况、天气情况等因素确定外业采集日期和作业时间段,作业方案规划完成后,即可开始进行数据采集作业。根据预先规划好的采集线路及采集顺序,进行外业采集作业。 数据采集整个过程的主要环节有:基站架设、设备安装、数据采集、装备拆卸、基站拆卸、设备维护6个方面。

图2 全景移动测量系统
针对GPS信号差地区(如道路狭窄、高楼林立、行树茂盛),通过全站仪采集控制点,使用系统配套POS纠偏功能,进行POS轨迹纠偏。纠偏控制点可以来源于大比例尺高精度线划图、或全站仪测量控制点。根据专题图精度要求,在GPS信号差位置,沿道路每隔500米需要布设一个控制点,拐弯位置需要增加控制点。 POS纠偏总体作业流程包括外业数据采集、POS数据解算、数据融合处理、POS纠偏软件处理、再次POS解算、及再次融合处理,流程如图所示。
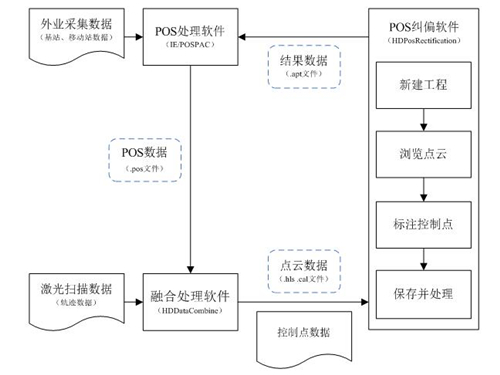
图3 高精度点云融合过程
全景移动测量系统外业采集,经过内业融合解算之后,需要对工程数据进行检查。检查内容包括:点云精度、全景影像与点云配准精度、全景影像质量、全景数目一致、测区覆盖情况、工程之间叠加检查等。经过检查合格的工程数据,才能进入下一步内业采集提取。 2.5 内业专题数据提取 内业提取基于全景移动测量系统配套的点云测图建库ArcGIS插件软件进行作业采集,首先使用自动化和半自动化提取工具,进行批量采集提取,然后再手工检查错提和漏提,完成图形和基本属性提取之后,再进行属性录入。
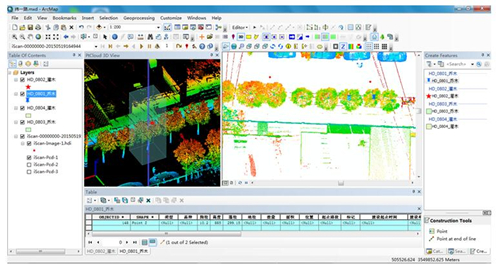
图4 内业专题数据生产软件平台
内业提取采集的成果数据,经过检查后,需要叠加地图,设置符号化配图进行打印外业调绘。外业实地调绘检查,绘制草图并填写调绘表。内业根据调绘草图和填写的调绘表,进行内业成图和属性录入。 3 海量点云全景数据管理 本文研究采用的全景移动测量系统采集的点云具有高精度高密度特点,全景影像也是高分辨率,为快速加载浏览显示点云和全景影像数据,需要采用高效的数据存储格式。本文引用全景移动测量系统配套软件中所设计点云与全景影像存储格式,进行描述说明。 3.1 点云数据存储 全景移动测量系统采集点云频率是100万点每秒,按照50公里时速进行采集,10公里点云有效数据大约6GB。高密度高精度海量点云数据如何有效存储,实现快速加载显示,成为至关重要问题。 本文研究所使用的点云测图软件,点云存储的基本原则是采用分级分块,每个级别对应一个显示比例尺范围,一个级别内部采用3级三维R树索引,将点云三维空间划分成块集、块、包,一个块集包含若干块,一个块包含若干包,每个包采用逻辑压缩和物理压缩方法对数据进行压缩存储。对于大规模测区、地区城市级点云数据,采用云存储方式,将点云索引和分块点云数据存储在云存储服务器上。 基于以上点云存储设计思路,在普通PC机上(i3处理器,内存4GB),点云测图软件可以实现100亿级点云数据快速加载显示,加载显示响应时间小于1秒,放大缩小漫游无卡顿现象,刷新响应时间小于1秒,平均占用内存不超过200MB。 点云高效的空间索引组织方式,是自动化分类算法快速分析提取的基础,本文研究的基于点云自动化提取对象,均使用点云空间索引进行海量点云数据读取。 3.2 全景数据存储 全景移动测量系统,全景影像采集方式有距离触发、时间触发,一般情况下外业采集采用8米距离触发。一张高清全景影像默认输出分辨率8192*4096,全景文件大小是16MB左右,10公里包括1250帧左右,文件大小大约20GB左右。 全景影像存储采用分级金字塔瓦片方式,包括0-4级5个级别,0级1张瓦片512*256,4级512张瓦片256*256,总分辨率8192*4096。瓦片图片采用本地文件数据库存储,瓦片编码索引:“帧号+级别+行号+列号”。点云测图软件,在三维场景中构建多级球面模型,采用多线程进行瓦片数据请求,请求读取到的瓦片按级别和行列编号,贴到对应球体位置显示。 基于以上全景存储设计思路,在普通PC机上(i3处理器,内存4GB),点云测图软件可以快速浏览显示全景,可快速切换前后帧和放大缩小旋转漫游浏览。 4 自动化半自动化提取算法研究 本文研究的自动化提取要素类别包括:行道树、路边停车位、路灯、道路标线,半自动化提取要素包括:垃圾箱、广告牌匾。 每一类要素提取分别研究相应算法,进行矢量化提取,根据空间分布特征和激光强度特征,以及沿车载轨迹线分布特征,进行分析自动化提取。 4.1 道路边线自动化提取 将道路类型划分为:高速公路、一般路(是否包含绿化隔离带、右侧是否马路牙、左侧是否包含马路牙),高速公路以应急车道外侧的道路标线作为目标分析,一般路以隔离带和马路牙作为目标分析。下面以马路牙分析为例进行算法步骤描述。 1)读取扫描圈轨迹数据,获取激光扫描仪轨迹点Ps1 、Ps1 、Ps1 … Ps100,读取分析前100扫描圈点云,分析每圈点云离行驶方向水平垂足投影最近的点,得到地面点Pg1、Pg2、Pg3…Pg100,用扫描仪轨迹点和地面点统计扫描仪离地面平均高度Hs。 2)获取轨迹线右侧扫描圈点云,在扫描圈上从轨迹投影点向右依次分段(8cm一段,马路牙高度,可以配置)分析法向量,法向量垂直认为是地面点,分析获取整个右侧扫描圈,如果法向量接近水平,则保存记录点集、所在圈号、法向量(ScanVertical扫描竖线)。 3)按扫描圈顺序分析所有圈点云,获取所有扫描圈内部的ScanVertical扫描竖线,对扫描竖线进行邻域分析,如果相邻扫描线存在纵向1米以上相邻的扫描竖线,并且高度都接近8cm,则认为是马路牙的扫描竖线ScanCurb。 4)根据提取的马路牙点云,分析获取道路边线。
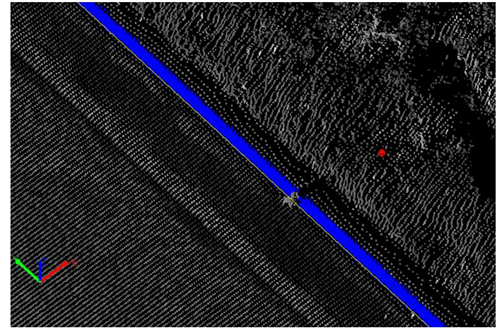
图5 道路边线自动化提取
路边停车位特点是分布在行车道右侧道路边缘位置,具有停车位标线画定标记,停车位标线框有固定大小和特征。关于停车位国家标准描述是(《道路交通标志和标线_GB5768-2009》)“停车位标线按两种车型规定尺寸,上限尺寸长为1560cm,宽为325cm,适用于大中型车辆,下限尺寸长为600cm,宽为250cm,适用于小型车辆。在条件受限时,宽度可适当降低,但最小不应低于200cm。”,下面描述提取算法分析步骤:
1)根据激光扫描头POS轨迹线,分析获取扫描头离地面高度值;
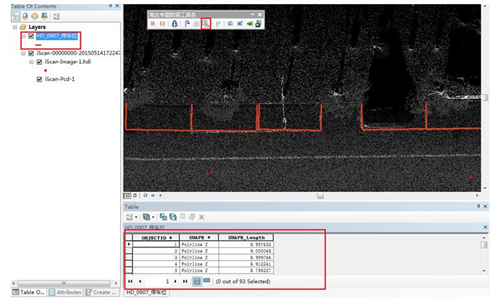
图6 停车位自动化提取
4.3 车道标线自动化提取 不同等级类型道路车道虚线和车道实线宽度有国家标准(《道路交通标志和标线_GB5768-2009》)。关于车道标线的标准描述是“车行道边缘白色虚实线的一般线条宽度为15cm 或20cm,交通量非常小的农村公路、专属专用道路等特殊应用情况下,车行道边缘白色虚实线的线宽可采用10cm,虚实线间距为15cm~20cm,虚线线段及间隔长分别为2m和4m”。
1)根据激光扫描头POS轨迹线和扫描圈点云,分析获取扫描头离地面高度值、扫描圈XOY平面投影线与行使POS轨迹夹角;
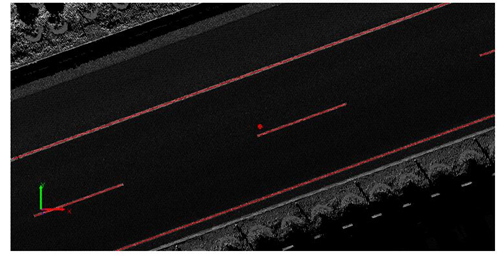
图7 车道标线自动化提取
行道树特征是沿道路两旁分布,靠近慢车道的人行道上或者绿化隔离带中,树包含树干、树冠部分,树干近圆柱状,树冠是沿树干成发散状。其提取分析算法步骤如下:
1)读取激光扫描头POS轨迹线,以POS轨迹线进行左右缓冲(缓冲距离可配置),得到分析范围。
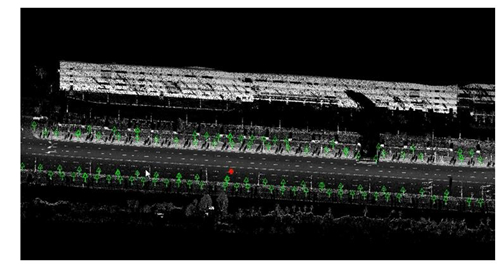
图8 行道树自动化提取
垃圾箱特征是沿道路两旁分布,靠近慢车道的人行道或者绿化带中,形状特征包括:圆柱体、立方柱体、椭圆柱体等,有单筒或多筒样式。鉴于垃圾箱数目有限,形状多样,考虑采用半自动化方式提取,采用俯视图手工拉框垃圾箱周边点云,程序自动计算中心位置,并计算长宽高属性。 其提取分析算法步骤如下:
1)获取用户框选范围的点云集合;
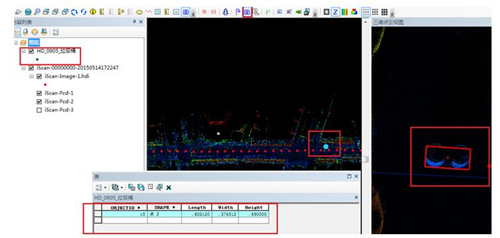
图9 垃圾箱半自动化提取
本文使用全景移动测量系统,对城市专题数据进行外业采集和内业提取,减轻传统测量外业采集工作量和劳动强度,提高工作效率,内业处理提取软件集成自动化和半自动化提取算法工具,提高内业生产效率。通过试验区采集处理验证,可以大幅度提高生产效率,为城市专题图数据生产更新,提供更便捷有效的解决方案。可以进行更大范围应用推广。 |